






In April 2020, I joined the CoVent-19 Challenge - an open innovation effort to design a rapidly deployable mechanical ventilator. I reached out to engineers on the Slack group and joined and helped lead the Late Game Changers team - a group of ten engineers and medical proffesionals around the USA to work on this challenge and propose a CAD model design and manufacturing and materials plan by May 1, 2020.
To view all our submission materials (including team movie, manufacturing and materials plan, step models, BOM, .etc) on GrabCAD, please visit the following link. Our intention is for our design and ideas to be open source and to facilitate communication and knowledge share during a challenging time.
In researching initial purely mechanical ventilation concepts, I took a free Harvard course on edx.org to learn more about ventilation modes and requirements. In the process, I also learned of the Bird 7 mechanical ventilator, a purely mechanical ventilator developed in the 1960s by Dr. Forrest Bird, a prolific inventor. This device, though outdated in some regards, is used globally and is known for its portability and ease of use. I procured one from a medical supplier and shipped it to my colleague in West Virginia, who proceeded to do a detailed teardown to gain an understanding of the internal mechanisms and components, to see what concepts we could build on or emulate.
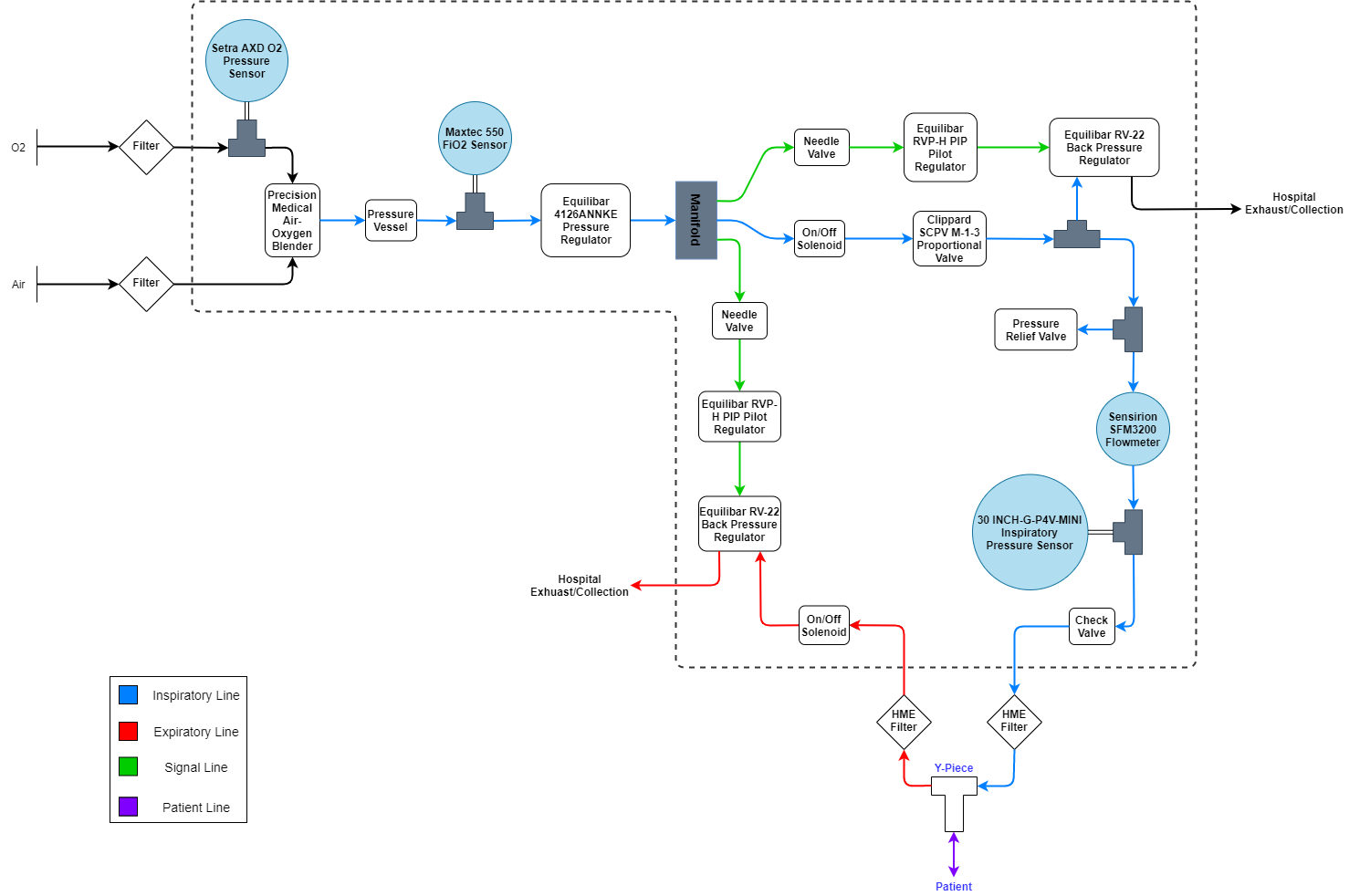
We determined eventually that a purely mechanical design would not fulfill the challenge brief requirements specified by Ximedica, one of the challenge sponsors. In developing the pneumatic diagram of our design, our team wanted to prioritize modularity, medical-grade off-the-shelf pneumatic components, industrial-grade electronics such as Industrial Arduinos, and shields from Automation Direct (instead of Arduino Unos or Raspberry Pis), and additive manufacturing tools provided by Stratsys. We proposed alternatives for components with high complexity and/or schedule risk.
I took great care to ensure that all Off-the-Shelf parts, which include pressure regulators, oxygen sensors, flow meters, proportional valves, and pressure sensors had been sourced with specific regard to demand given the stressed COVID supply chain. As a result, I contacted vendors before committing to a part to ensure that the price, lead time, and technical specifications were adequate. We had a technical/sales representative working with us on each item providing support as well as quotes.
I designed and 3D printed DIN-Rail to component mounts based off of existing best-practice snap fit designs from McMaster-Carr and Automation Direct. They are designed and engineered to sustain the load of every sourced off-the-shelf component in our system. Standard ¼” screws or industrial adhesive may be used to mount the DIN Rail into the enclosure. If a component malfunctions and needs to be removed, the hassle of securing hardware is avoided. The user would be able to snap the component and DIN mount off the DIN Rail and service/replace it as needed. While we have the capability to produce mounts for the prototype, we envisioned them to be 3D printed using world-class Stratasys machines. These mounts can easily be modified to physically prevent incorrect assembly during the mass-manufacturing phase.
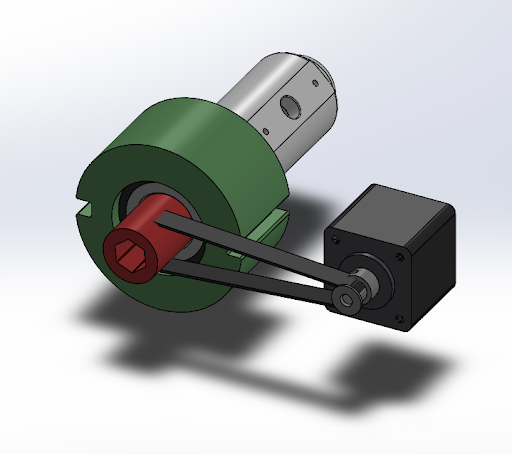
Our pneumatic design proposed modification of Equlibar RVP-H and RVP-L PIP and PEEP pilot pressure regulators with 3D printed parts to allow control using NEMA-17 stepper motors. We designed an adapter to couple the stepper motor to the ¼” hex bolt head of the regulator. Should this approach become a schedule risk, an alternate solution would be adding a conical spring to Dominic Textor’s widely available PANDA PEEP valve design.
This sub-assembly shows all components on the main gas inspiratory line from the O2 and Air hospital wall outlets up till the manifold (pink) that then splits off into three gas lines using a McMaster manifold (pink). In this image, we see two HEPA filters (blue) from the wall outlet for the two O2 and air supply lines at 50 psi, followed by a Precision Medical gas blender (white/green) that mixes O2 and air at regulated FiO2 % levels. In line, are also an FiO2 sensor (grey) from Maxtech, and an oxygen detection sensor (grey) from Setra. The mixed gas then drops from 50 psi to 2 psi using an Equilibar Series 41 manual regulator (black/grey) to meet the 5-60 cm H20 pressure regulation requirement that the patient is exposed to.
This sub-assembly picks up from the manifold in the pneumatic diagram where the gas line splits into two dome gas supply lines for PIP and PEEP regulation using the Equilibar knob-adjust (turned motor controlled using NEMA stepper motors and belt drive (green/red)) precision regulators (black), as well a Clippard proportional valve (turquoise) on the main line followed by two Equilibar RV-22 dome loaded back pressure regulators (black). We were interested in this line of regulators having been designed specifically for ventilator applications and meeting our low pressure regulation requirement of 5-60 cm H2O, and <60 L/m flow requirement. Also included are needle valves (grey) from McMaster to control flow into the knob regulators precisely, as well as on/off Solenoid valves (grey/black) at the patient Y-piece outlet and inlet ro regulate volume control using input from a Sensirion flow meter (grey) and Honeywell pressure sensor. Additional filters (blue) outside the enclosure on the patient Y-piece inlet and outlet are shown. Fittings and tubing shown are colored blue. Finally, the controls block is shown using Industrial Arduinos, shields, and a 120 VAC power supply sourced from Automation Direct.
Our team worked with a professional user interface designer to develop mockups for the user interface that will be implemented on the Nextion touchscreen (capacitive touch and Arduino-IDE compatible) mounted to the top lid of the ventilator enclosure. We intended to use a combination of touch inputs, a rotary encoder, and physical lockout switch to create a simple and intuitive user experience.
Top plane cross sectional view of the top assembly with all sub assemblies included and the lid and Nextion touchscreen removed. Although we did not progress to the second round of the challenge which included further design guidance and support for building a prototype, we are actively seeking grants/funding and mentorship to continue developing this project. We consider our efforts to be a very promising project that is at the intersection of high-end, resource-pressed Medtronic Puritan-Bennett hospital ventilators and unregulated bag valve designs that are being put out there using very cheap and low quality sensors, electronics, regulators, etc. with little to no regulation compliance.