








The 2016-2017 Flagship Battlebot team comprising seven dedicated ASME members built a 60 lb. combat robot (DangerCone) to compete in the Robogames in San Mateo.
The design is unlike any classic bot and consists of shell-spinning elements where the outer steel shells are controlled as both wheels and weapon.
The final CAD design took the fall quarter of 2016 to finalize.
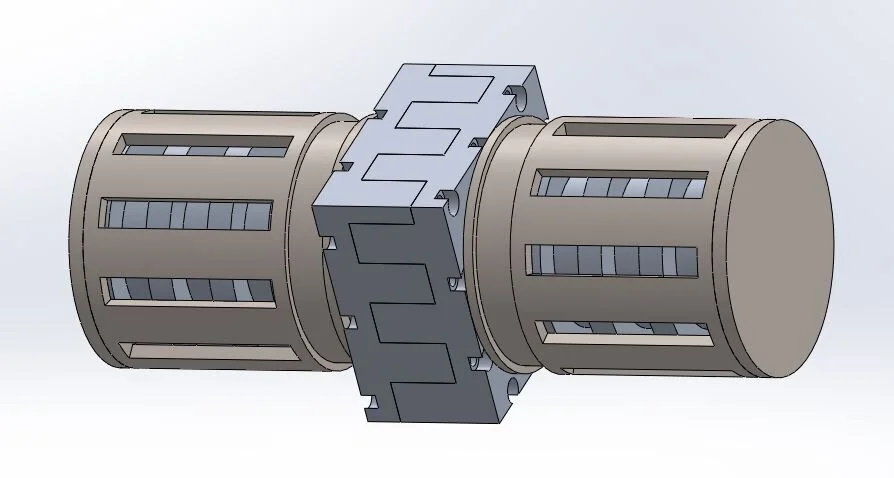
Fully exploded CAD. The bot was expected to achieve top speeds of 1400 rpm and employs a technique called “melty brain control” where translational drift and rotation are controlled while steering the robot in a given direction all on the same drive, as opposed to a robot using a separate drive for motion while the spinning body rotates in a fixed position.
That theory had to be tested though. I was responsible for creating a small scale prototype to simulate “melty brain control” and make design changes.
Winter quarter called for the start of some complex manufacturing! We used a boring bar to bore out a massive 2 ft. tall cylinder of steel and secured it in the mill to begin boring out holes to datum the slots correctly.
The steel shells as a work in progress. We turned the slot for the rubber treads that would serve as wheels to ensure a tight fit.
In tandem, the parts comprising the aluminum 7075 body, that the steel shells would wrap around, was also bored on the lathe and turned to +-0.005 of the desired dimensions.
All tools and assembly materials laid out.
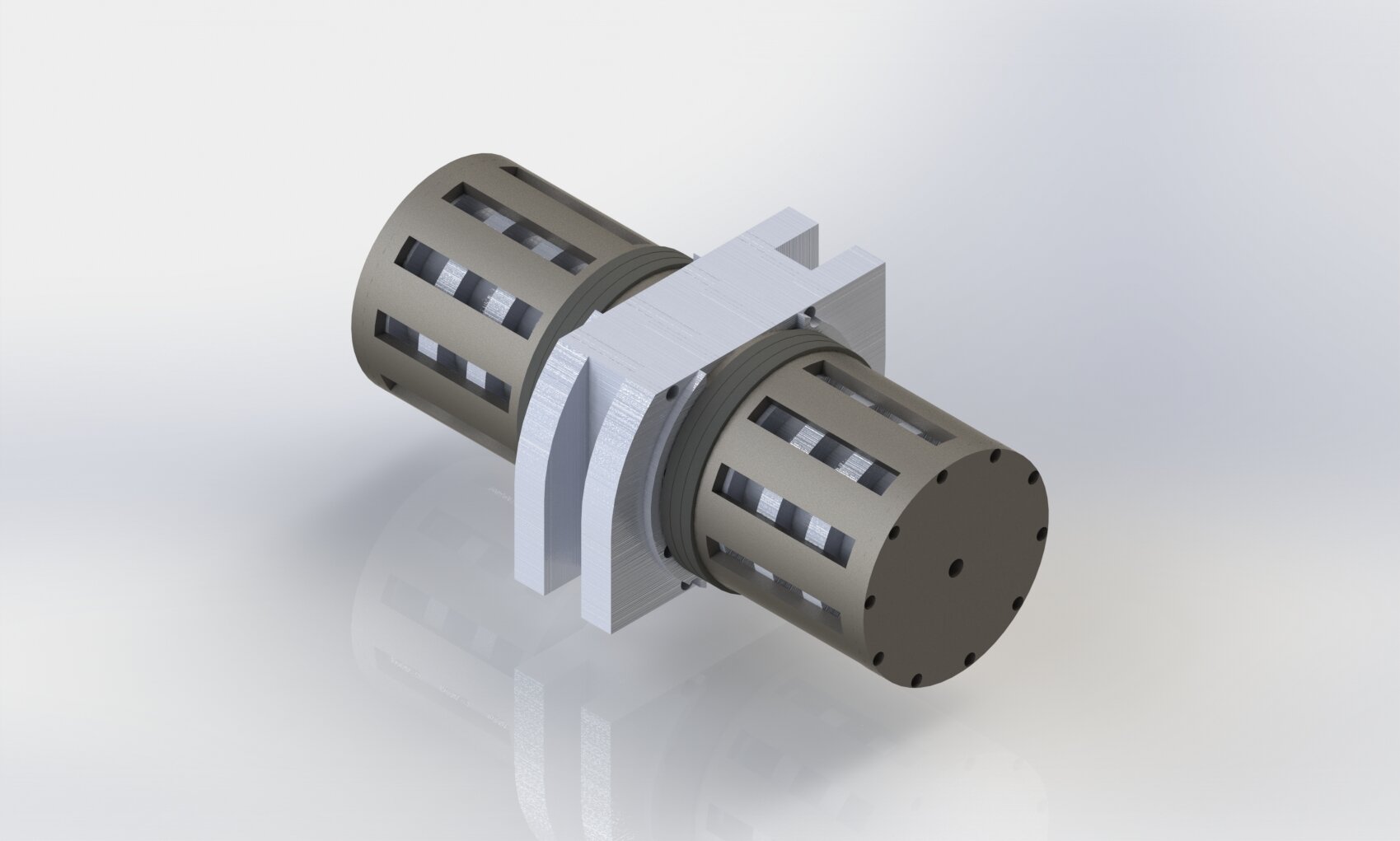
The DangerCone full assembled with a view of the inner shafts and bearing assemblies. The center body was designed with a jigsaw locking system and CNCed.